

近日,立得空间与安徽合力合作的智能物料搬运系统项目顺利通过验收。双方共同合作研发并推广智能物料搬运系统,解决行业痛点,为社会及客户创造价值。本次合作产品为10吨牵引车,立得空间负责智能驾驶系统开发,并为合力提供智驾硬件;负责车辆调度管理系统开发,满足客户对无人驾驶工业车辆作业场景的管理需求。

智能驾驶系统
立得空间凭借领先的移动测量技术和slam算法自研“路霸”机器人行进系统(pns),可为任何机器人配套提供定位导航系统,具有测量、感知、导航、定位、控制等功能,帮助机器人安装“眼睛”和“耳朵”,使其能够“测路”、“走路”和“记路”,使机器人能够像人一样自主行进,是智能机器人实现深度感知、智能决策、灵巧执行和精准控制不可或缺的核心组件。

车辆调度系统
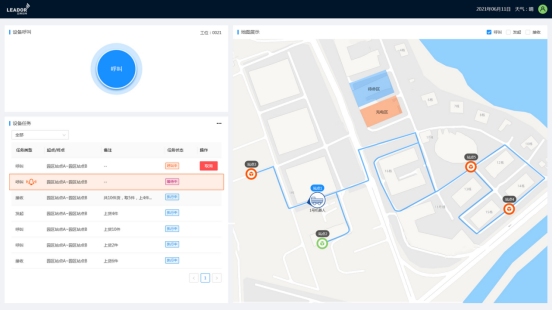
实时监控:包括对机器人及辅助设备状态的监控、任务状态的监控与执行监控。对机器人的状态监控包含设备的在线状态,机器人速度、航向、电池状态,机器人安全感知传感器状态、定位导航状态等。
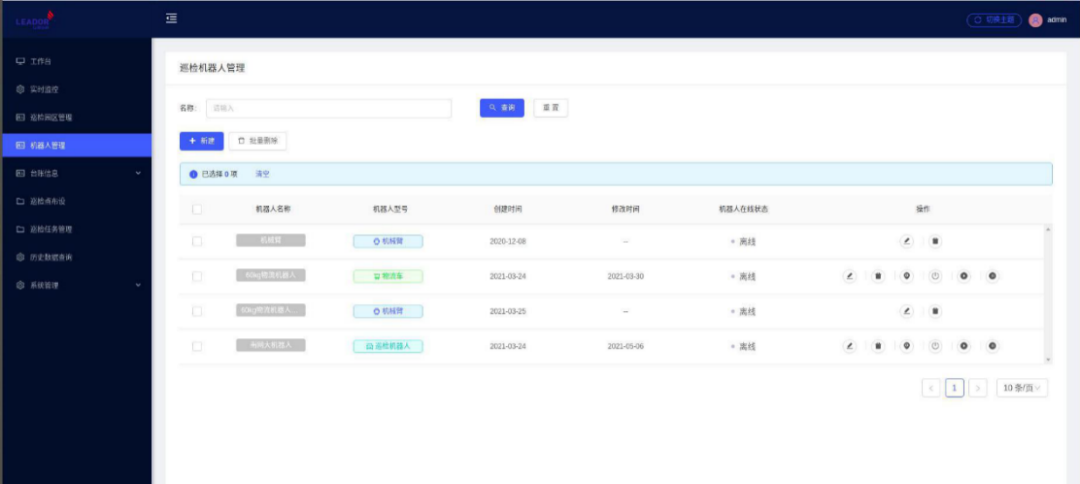
设备管理:对接入系统中的设备进行管理,包括机器人id与分类、机器人属性配置、辅助设备配置管理等。
地图布局管理:主要是对物流厂区内地图、路径、库位布局进行管理编辑,包括对机器人运行地图的管理、更新、导入与编辑,机器人路网的设置与编辑,辅助设备包括充电桩、自动门、交通信号灯等的位置编辑等。

告警管理:包括对全部机器人告警信息、辅助设备的告警信息、物流任务的告警信息的记录、分析、汇总,通过大屏或终端设备可显示告警设备位置与信息,并进行声光提示与处理建议,通知运维人员进行检查与处理。
充电管理:对机器人的电量状态、充电站状态进行监控,并结合充电站的运行状态和当前的任务执行情况,合理安排有需要的机器人进行自主充电,补充能源。
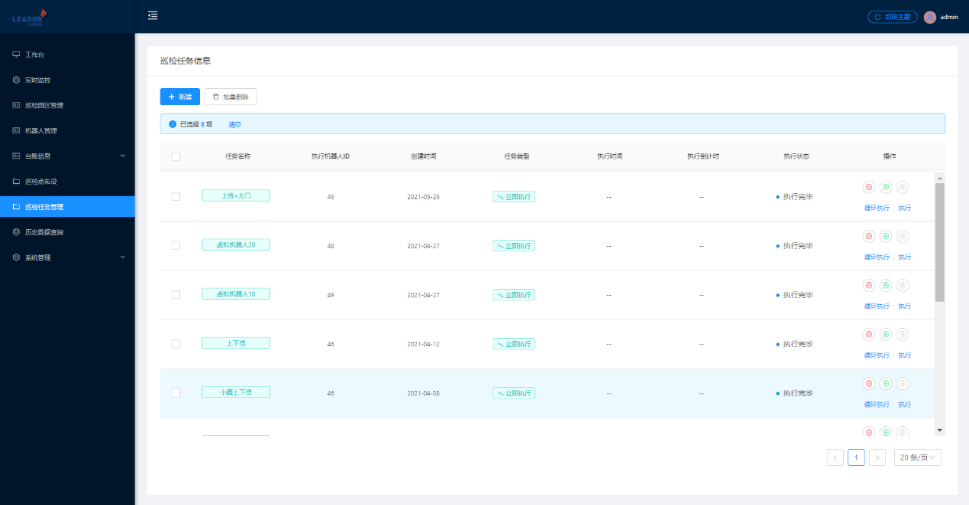
任务管理:根据呼叫端或呼叫设备发出的指令,规划出机器人的调度任务,并根据各终端的状态自主分配任务到可用机器人上。该功能同时支持手动设置调整任务顺序,可置顶、挂起或取消任务,能够显示任务列表中各个任务的具体信息。
路径规划:能够根据呼叫端下发的起始点位置,结合场内机器人位置状态以及电量状态,对已分配任务机器人的路径进行最优规划,使得其耗电量与效率达到最优平衡。同时在遇到障碍物或信号灯控制时,能够对附近的机器人进行路径重新规划与交通管制功能。
远程呼叫:能够对受控机器人进行远程遥控,具备远程遥控机器人的启停动作,具备前进后退、转向、行车自动以及驻车制动的控制,具备远程对货叉进行操作控制。该功能能够通过app或网页在移动终端如手机、平板上进行控制。
立得空间在测绘与地理信息、智慧交通应用乐博官网的解决方案方面经验丰富,安徽合力在工业车辆设计、制造、销售网络等方面具备领先优势。双方未来也将继续发挥各自优势,强强联合,共同探索与拓展在智慧园区物流建设中智能化转运需求的市场机遇。